网站首页
关于我们
公司简介
发展历程
企业文化
资质荣誉
应用领域
应用领域
应用场景
产品中心
金刚石材料
嵌入式模组
SiC模块
SiC单管
IGBT模块
IGBT单管
消费类器件
质量管理
质量方针
质量体系认证
可靠性能力简介
新闻中心
行业新闻
公司动态
技术推广
联系我们
联系我们
招贤纳士
应用仿真
Application
应用领域
应用领域
应用场景
应用领域
人工智能数据中心
光伏发电
储能PCS
新能源汽车
具身智能
低空经济
工业控制
充电桩
风电
电源及电能质量
氢能
智能生活
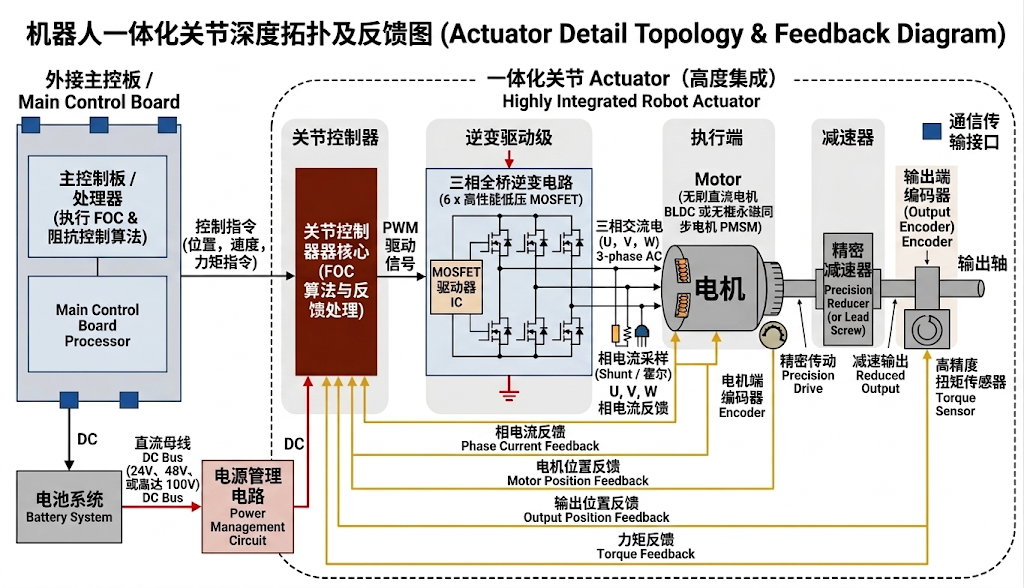
具身智能
1.方案描述
具身智能机器人一体化关节采用“控制-驱动-执行-传感”高度集成的拓扑架构。系统由直流母线供电,关节控制器运行FOC算法,通过由高性能MOSFET组成的三相逆变电路驱动电机(BLDC/PMSM),并配合精密减速器输出扭矩。通过电流、位置及力矩传感器的多维反馈实现精准闭环。功率覆盖10W至2kW,满足从灵巧手到下肢承重关节的多样需求。
2.系统示意图
3.产品列表
Package
Part Number
V
CE
(V)
I
C
(A)
V
CE
(sat)
(V)
V
GE
(th)
(V)
Eon
(mJ)
Eoff
(mJ)
ACP-3SPlus
AMG1K0L12P5H7RA AMG1K0L12P5H7RB
1200
1000
1.81
4.8
19.5
29.7
首页
上一页
1
下一页
尾页
产 品
新 闻
网站地图
联系我们
全国服务热线:
0551-68281313
关注微信公众号
关于我们
公司简介
发展历程
企业文化
资质荣誉
应用领域
应用领域
应用场景
产品中心
金刚石材料
嵌入式模组
SiC模块
SiC单管
IGBT模块
IGBT单管
消费类器件
新闻中心
行业新闻
公司动态
技术推广
联系我们
联系我们
招贤纳士
Copyright © 2022 阿基米德半导体(合肥)有限公司 版权所有
皖ICP备2022007744号
安徽省合肥市高新区长宁大道789号5号楼
在线留言
客服热线
客服热线
0551-68281313
公众号
关注微信公众号